AWAITING HARDWARE LINK // MISSION 2026
With mission funding secured, we are moving into the active engineering phase. Our 2026 platform is being designed for the most rigorous NURC task requirements.
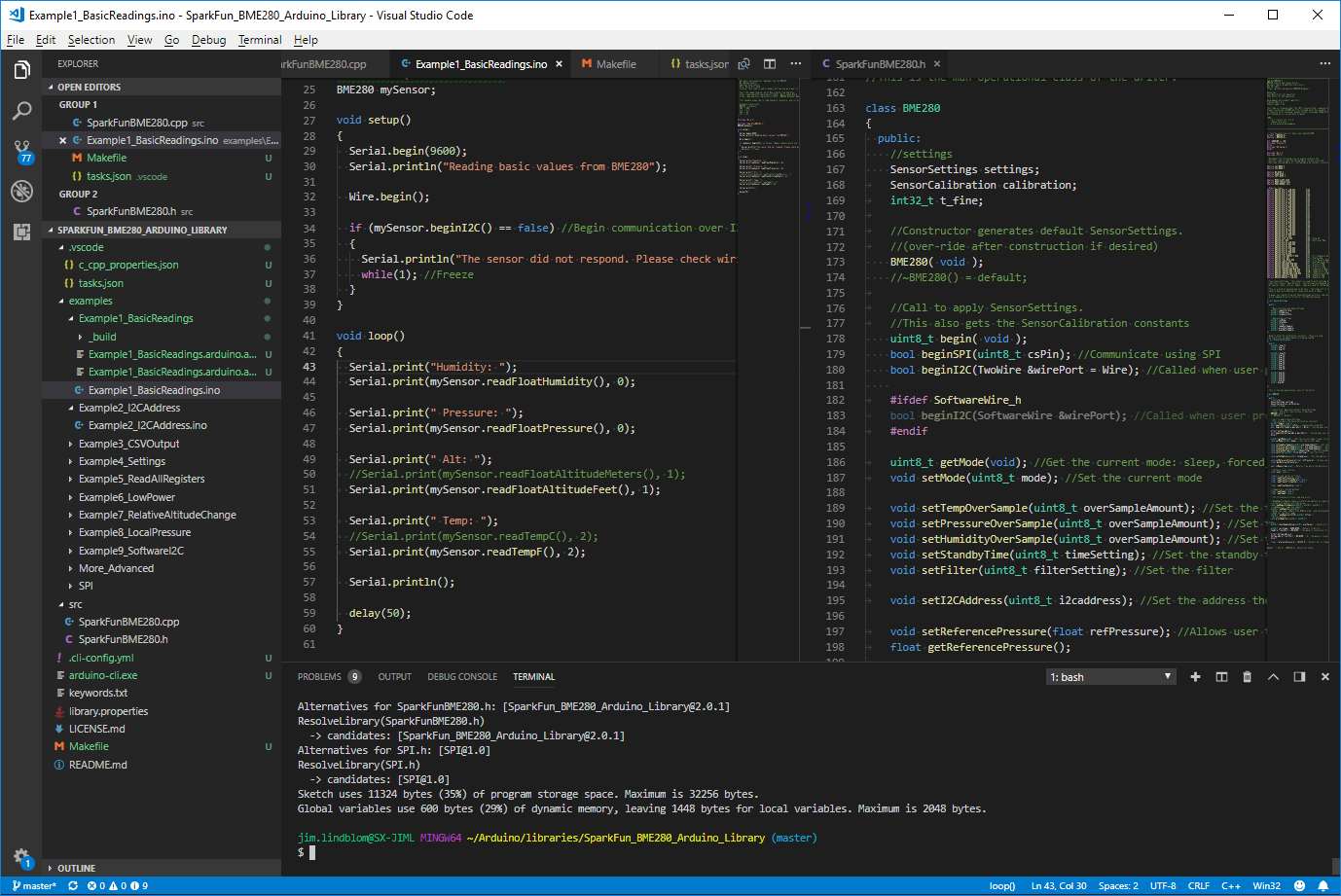
Our control systems are built on the Arduino platform, leveraging C++ to bridge the gap between pilot input and real-time motor response. We are currently developing a multi-axis vision system and a refined code architecture designed to provide maximum situational awareness during underwater tasks
Team founded at Dobson High.
Won "Judges Award" at NURC debut.
Continuing our mission.
